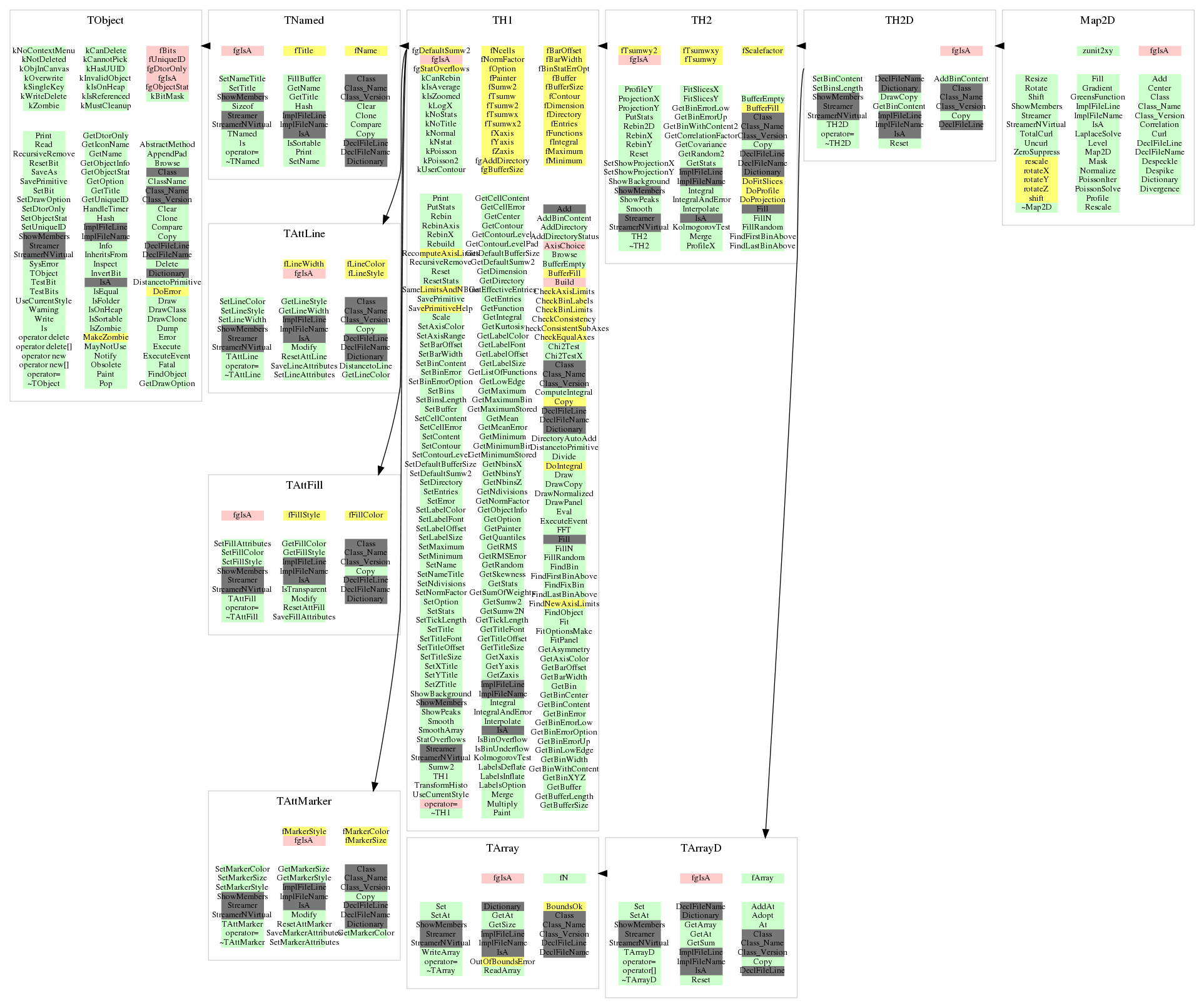
class Map2D: public TH2D
Function Members (Methods)
public:
| Map2D() | |
| Map2D(const Map2D& m) | |
| Map2D(const TH2D& h) | |
| virtual | ~Map2D() |
| void | TObject::AbstractMethod(const char* method) const |
| virtual Map2D& | Add(const Map2D* map, Double_t c = 1) |
| virtual Map2D& | Add(const Map2D* map1, const Map2D* map2, Double_t c1 = 1, Double_t c2 = 1) |
| void | TArrayD::AddAt(Double_t c, Int_t i) |
| virtual void | TH2D::AddBinContent(Int_t bin) |
| virtual void | TH2D::AddBinContent(Int_t bin, Double_t w) |
| static void | TH1::AddDirectory(Bool_t add = kTRUE) |
| static Bool_t | TH1::AddDirectoryStatus() |
| void | TArrayD::Adopt(Int_t n, Double_t* array) |
| virtual void | TObject::AppendPad(Option_t* option = "") |
| Double_t | TArrayD::At(Int_t i) const |
| virtual void | TH1::Browse(TBrowser* b) |
| virtual Int_t | TH2::BufferEmpty(Int_t action = 0) |
| virtual Map2D& | Center() |
| virtual Double_t | TH1::Chi2Test(const TH1* h2, Option_t* option = "UU", Double_t* res = 0) const |
| virtual Double_t | TH1::Chi2TestX(const TH1* h2, Double_t& chi2, Int_t& ndf, Int_t& igood, Option_t* option = "UU", Double_t* res = 0) const |
| static TClass* | Class() |
| virtual const char* | TObject::ClassName() const |
| virtual void | TNamed::Clear(Option_t* option = "") |
| virtual TObject* | TNamed::Clone(const char* newname = "") const |
| virtual Int_t | TNamed::Compare(const TObject* obj) const |
| virtual Double_t | TH1::ComputeIntegral() |
| virtual void | TH2D::Copy(TObject& hnew) const |
| virtual Double_t | Correlation(const Map2D* map, Double_t contrast = 1) const |
| virtual Double_t | Curl(const Map2D* Vx, const Map2D* Vy) |
| virtual void | TObject::Delete(Option_t* option = "")MENU |
| virtual Int_t | Despeckle(Int_t maxsize = 0) |
| virtual Int_t | Despike(Double_t maxheight, Int_t regionsize = 3) |
| virtual void | TH1::DirectoryAutoAdd(TDirectory*) |
| Int_t | TAttLine::DistancetoLine(Int_t px, Int_t py, Double_t xp1, Double_t yp1, Double_t xp2, Double_t yp2) |
| virtual Int_t | TH1::DistancetoPrimitive(Int_t px, Int_t py) |
| virtual Double_t | Divergence(const Map2D* Vx, const Map2D* Vy) |
| virtual Bool_t | TH1::Divide(const TH1* h1) |
| virtual Bool_t | TH1::Divide(TF1* f1, Double_t c1 = 1) |
| virtual Bool_t | TH1::Divide(const TH1* h1, const TH1* h2, Double_t c1 = 1, Double_t c2 = 1, Option_t* option = "")MENU |
| virtual void | TH1::Draw(Option_t* option = "") |
| virtual void | TObject::DrawClass() constMENU |
| virtual TObject* | TObject::DrawClone(Option_t* option = "") constMENU |
| virtual TH1* | TH2D::DrawCopy(Option_t* option = "") const |
| virtual TH1* | TH1::DrawNormalized(Option_t* option = "", Double_t norm = 1) const |
| virtual void | TH1::DrawPanel()MENU |
| virtual void | TObject::Dump() constMENU |
| virtual void | TObject::Error(const char* method, const char* msgfmt) const |
| virtual void | TH1::Eval(TF1* f1, Option_t* option = "") |
| virtual void | TObject::Execute(const char* method, const char* params, Int_t* error = 0) |
| virtual void | TObject::Execute(TMethod* method, TObjArray* params, Int_t* error = 0) |
| virtual void | TH1::ExecuteEvent(Int_t event, Int_t px, Int_t py) |
| virtual void | TObject::Fatal(const char* method, const char* msgfmt) const |
| virtual TH1* | TH1::FFT(TH1* h_output, Option_t* option) |
| virtual Map2D& | Fill(const Map2D* map) |
| virtual void | TNamed::FillBuffer(char*& buffer) |
| virtual void | TH2::FillN(Int_t, const Double_t*, const Double_t*, Int_t) |
| virtual void | TH2::FillN(Int_t ntimes, const Double_t* x, const Double_t* y, const Double_t* w, Int_t stride = 1) |
| virtual void | TH2::FillRandom(const char* fname, Int_t ntimes = 5000) |
| virtual void | TH2::FillRandom(TH1* h, Int_t ntimes = 5000) |
| virtual Int_t | TH1::FindBin(Double_t x, Double_t y = 0, Double_t z = 0) |
| virtual Int_t | TH2::FindFirstBinAbove(Double_t threshold = 0, Int_t axis = 1) const |
| virtual Int_t | TH1::FindFixBin(Double_t x, Double_t y = 0, Double_t z = 0) const |
| virtual Int_t | TH2::FindLastBinAbove(Double_t threshold = 0, Int_t axis = 1) const |
| virtual TObject* | TH1::FindObject(const char* name) const |
| virtual TObject* | TH1::FindObject(const TObject* obj) const |
| virtual TFitResultPtr | TH1::Fit(const char* formula, Option_t* option = "", Option_t* goption = "", Double_t xmin = 0, Double_t xmax = 0)MENU |
| virtual TFitResultPtr | TH1::Fit(TF1* f1, Option_t* option = "", Option_t* goption = "", Double_t xmin = 0, Double_t xmax = 0) |
| static Int_t | TH1::FitOptionsMake(Option_t* option, Foption_t& Foption) |
| virtual void | TH1::FitPanel()MENU |
| virtual void | TH2::FitSlicesX(TF1* f1 = 0, Int_t firstybin = 0, Int_t lastybin = -1, Int_t cut = 0, Option_t* option = "QNR", TObjArray* arr = 0)MENU |
| virtual void | TH2::FitSlicesY(TF1* f1 = 0, Int_t firstxbin = 0, Int_t lastxbin = -1, Int_t cut = 0, Option_t* option = "QNR", TObjArray* arr = 0)MENU |
| const Double_t* | TArrayD::GetArray() const |
| Double_t* | TArrayD::GetArray() |
| TH1* | TH1::GetAsymmetry(TH1* h2, Double_t c2 = 1, Double_t dc2 = 0) |
| virtual Double_t | TArrayD::GetAt(Int_t i) const |
| virtual Color_t | TH1::GetAxisColor(Option_t* axis = "X") const |
| virtual Float_t | TH1::GetBarOffset() const |
| virtual Float_t | TH1::GetBarWidth() const |
| virtual Int_t | TH1::GetBin(Int_t binx, Int_t biny = 0, Int_t binz = 0) const |
| virtual Double_t | TH1::GetBinCenter(Int_t bin) const |
| virtual Double_t | TH2D::GetBinContent(Int_t bin) const |
| virtual Double_t | TH2D::GetBinContent(Int_t binx, Int_t biny) const |
| virtual Double_t | TH2D::GetBinContent(Int_t binx, Int_t biny, Int_t) const |
| virtual Double_t | TH1::GetBinError(Int_t bin) const |
| virtual Double_t | TH1::GetBinError(Int_t binx, Int_t biny) const |
| virtual Double_t | TH1::GetBinError(Int_t binx, Int_t biny, Int_t binz) const |
| virtual Double_t | TH2::GetBinErrorLow(Int_t binx, Int_t biny) |
| virtual TH1::EBinErrorOpt | TH1::GetBinErrorOption() const |
| virtual Double_t | TH2::GetBinErrorUp(Int_t binx, Int_t biny) |
| virtual Double_t | TH1::GetBinLowEdge(Int_t bin) const |
| virtual Double_t | TH1::GetBinWidth(Int_t bin) const |
| virtual Double_t | TH1::GetBinWithContent(Double_t c, Int_t& binx, Int_t firstx = 0, Int_t lastx = 0, Double_t maxdiff = 0) const |
| virtual Double_t | TH2::GetBinWithContent2(Double_t c, Int_t& binx, Int_t& biny, Int_t firstxbin = 1, Int_t lastxbin = -1, Int_t firstybin = 1, Int_t lastybin = -1, Double_t maxdiff = 0) const |
| virtual void | TH1::GetBinXYZ(Int_t binglobal, Int_t& binx, Int_t& biny, Int_t& binz) const |
| const Double_t* | TH1::GetBuffer() const |
| Int_t | TH1::GetBufferLength() const |
| Int_t | TH1::GetBufferSize() const |
| virtual Double_t | TH1::GetCellContent(Int_t binx, Int_t biny) const |
| virtual Double_t | TH1::GetCellError(Int_t binx, Int_t biny) const |
| virtual void | TH1::GetCenter(Double_t* center) const |
| virtual Int_t | TH1::GetContour(Double_t* levels = 0) |
| virtual Double_t | TH1::GetContourLevel(Int_t level) const |
| virtual Double_t | TH1::GetContourLevelPad(Int_t level) const |
| virtual Double_t | TH2::GetCorrelationFactor(Int_t axis1 = 1, Int_t axis2 = 2) const |
| virtual Double_t | TH2::GetCovariance(Int_t axis1 = 1, Int_t axis2 = 2) const |
| static Int_t | TH1::GetDefaultBufferSize() |
| static Bool_t | TH1::GetDefaultSumw2() |
| virtual Int_t | TH1::GetDimension() const |
| TDirectory* | TH1::GetDirectory() const |
| virtual Option_t* | TObject::GetDrawOption() const |
| static Long_t | TObject::GetDtorOnly() |
| virtual Double_t | TH1::GetEffectiveEntries() const |
| virtual Double_t | TH1::GetEntries() const |
| virtual Color_t | TAttFill::GetFillColor() const |
| virtual Style_t | TAttFill::GetFillStyle() const |
| virtual TF1* | TH1::GetFunction(const char* name) const |
| virtual const char* | TObject::GetIconName() const |
| virtual Double_t* | TH1::GetIntegral() |
| virtual Double_t | TH1::GetKurtosis(Int_t axis = 1) const |
| virtual Color_t | TH1::GetLabelColor(Option_t* axis = "X") const |
| virtual Style_t | TH1::GetLabelFont(Option_t* axis = "X") const |
| virtual Float_t | TH1::GetLabelOffset(Option_t* axis = "X") const |
| virtual Float_t | TH1::GetLabelSize(Option_t* axis = "X") const |
| virtual Color_t | TAttLine::GetLineColor() const |
| virtual Style_t | TAttLine::GetLineStyle() const |
| virtual Width_t | TAttLine::GetLineWidth() const |
| TList* | TH1::GetListOfFunctions() const |
| virtual void | TH1::GetLowEdge(Double_t* edge) const |
| virtual Color_t | TAttMarker::GetMarkerColor() const |
| virtual Size_t | TAttMarker::GetMarkerSize() const |
| virtual Style_t | TAttMarker::GetMarkerStyle() const |
| virtual Double_t | TH1::GetMaximum(Double_t maxval = FLT_MAX) const |
| virtual Int_t | TH1::GetMaximumBin() const |
| virtual Int_t | TH1::GetMaximumBin(Int_t& locmax, Int_t& locmay, Int_t& locmaz) const |
| virtual Double_t | TH1::GetMaximumStored() const |
| virtual Double_t | TH1::GetMean(Int_t axis = 1) const |
| virtual Double_t | TH1::GetMeanError(Int_t axis = 1) const |
| virtual Double_t | TH1::GetMinimum(Double_t minval = -FLT_MAX) const |
| virtual Int_t | TH1::GetMinimumBin() const |
| virtual Int_t | TH1::GetMinimumBin(Int_t& locmix, Int_t& locmiy, Int_t& locmiz) const |
| virtual Double_t | TH1::GetMinimumStored() const |
| virtual const char* | TNamed::GetName() const |
| virtual Int_t | TH1::GetNbinsX() const |
| virtual Int_t | TH1::GetNbinsY() const |
| virtual Int_t | TH1::GetNbinsZ() const |
| virtual Int_t | TH1::GetNdivisions(Option_t* axis = "X") const |
| virtual Double_t | TH1::GetNormFactor() const |
| virtual char* | TH1::GetObjectInfo(Int_t px, Int_t py) const |
| static Bool_t | TObject::GetObjectStat() |
| virtual Option_t* | TH1::GetOption() const |
| TVirtualHistPainter* | TH1::GetPainter(Option_t* option = "") |
| virtual Int_t | TH1::GetQuantiles(Int_t nprobSum, Double_t* q, const Double_t* probSum = 0) |
| virtual Double_t | TH1::GetRandom() const |
| virtual void | TH2::GetRandom2(Double_t& x, Double_t& y) |
| virtual Double_t | TH1::GetRMS(Int_t axis = 1) const |
| virtual Double_t | TH1::GetRMSError(Int_t axis = 1) const |
| Int_t | TArray::GetSize() const |
| virtual Double_t | TH1::GetSkewness(Int_t axis = 1) const |
| virtual void | TH2::GetStats(Double_t* stats) const |
| Stat_t | TArrayD::GetSum() const |
| virtual Double_t | TH1::GetSumOfWeights() const |
| virtual TArrayD* | TH1::GetSumw2() |
| virtual const TArrayD* | TH1::GetSumw2() const |
| virtual Int_t | TH1::GetSumw2N() const |
| virtual Float_t | TH1::GetTickLength(Option_t* axis = "X") const |
| virtual const char* | TNamed::GetTitle() const |
| virtual Style_t | TH1::GetTitleFont(Option_t* axis = "X") const |
| virtual Float_t | TH1::GetTitleOffset(Option_t* axis = "X") const |
| virtual Float_t | TH1::GetTitleSize(Option_t* axis = "X") const |
| virtual UInt_t | TObject::GetUniqueID() const |
| TAxis* | TH1::GetXaxis() const |
| TAxis* | TH1::GetYaxis() const |
| TAxis* | TH1::GetZaxis() const |
| virtual Int_t | Gradient(Map2D* Vx, Map2D* Vy) const |
| virtual Bool_t | GreensFunction(Double_t x0, Double_t y0) |
| virtual Bool_t | TObject::HandleTimer(TTimer* timer) |
| virtual ULong_t | TNamed::Hash() const |
| virtual void | TObject::Info(const char* method, const char* msgfmt) const |
| virtual Bool_t | TObject::InheritsFrom(const char* classname) const |
| virtual Bool_t | TObject::InheritsFrom(const TClass* cl) const |
| virtual void | TObject::Inspect() constMENU |
| virtual Double_t | TH2::Integral(Option_t* option = "") const |
| virtual Double_t | TH2::Integral(Int_t binx1, Int_t binx2, Int_t biny1, Int_t biny2, Option_t* option = "") const |
| virtual Double_t | TH2::Integral(Int_t, Int_t, Int_t, Int_t, Int_t, Int_t, Option_t* = "") const |
| virtual Double_t | TH2::IntegralAndError(Int_t binx1, Int_t binx2, Int_t biny1, Int_t biny2, Double_t& err, Option_t* option = "") const |
| virtual Double_t | TH2::Interpolate(Double_t x) |
| virtual Double_t | TH2::Interpolate(Double_t x, Double_t y) |
| virtual Double_t | TH2::Interpolate(Double_t x, Double_t y, Double_t z) |
| void | TObject::InvertBit(UInt_t f) |
| virtual TClass* | IsA() const |
| Bool_t | TH1::IsBinOverflow(Int_t bin) const |
| Bool_t | TH1::IsBinUnderflow(Int_t bin) const |
| virtual Bool_t | TObject::IsEqual(const TObject* obj) const |
| virtual Bool_t | TObject::IsFolder() const |
| Bool_t | TObject::IsOnHeap() const |
| virtual Bool_t | TNamed::IsSortable() const |
| virtual Bool_t | TAttFill::IsTransparent() const |
| Bool_t | TObject::IsZombie() const |
| virtual Double_t | TH2::KolmogorovTest(const TH1* h2, Option_t* option = "") const |
| virtual void | TH1::LabelsDeflate(Option_t* axis = "X") |
| virtual void | TH1::LabelsInflate(Option_t* axis = "X") |
| virtual void | TH1::LabelsOption(Option_t* option = "h", Option_t* axis = "X") |
| virtual Int_t | LaplaceSolve(const Map2D* mask = 0) |
| virtual Map2D& | Level() |
| virtual void | TNamed::ls(Option_t* option = "") const |
| virtual Map2D& | Mask(const Map2D* map, Int_t neg = 0, Double_t value = 0) |
| void | TObject::MayNotUse(const char* method) const |
| virtual Long64_t | TH2::Merge(TCollection* list) |
| virtual void | TAttLine::Modify() |
| virtual Bool_t | TH1::Multiply(const TH1* h1) |
| virtual Bool_t | TH1::Multiply(TF1* h1, Double_t c1 = 1) |
| virtual Bool_t | TH1::Multiply(const TH1* h1, const TH1* h2, Double_t c1 = 1, Double_t c2 = 1, Option_t* option = "")MENU |
| virtual Map2D& | Normalize() |
| virtual Bool_t | TObject::Notify() |
| void | TObject::Obsolete(const char* method, const char* asOfVers, const char* removedFromVers) const |
| static void | TObject::operator delete(void* ptr) |
| static void | TObject::operator delete(void* ptr, void* vp) |
| static void | TObject::operator delete[](void* ptr) |
| static void | TObject::operator delete[](void* ptr, void* vp) |
| void* | TObject::operator new(size_t sz) |
| void* | TObject::operator new(size_t sz, void* vp) |
| void* | TObject::operator new[](size_t sz) |
| void* | TObject::operator new[](size_t sz, void* vp) |
| TH2D& | TH2D::operator=(const TH2D& h1) |
| Double_t& | TArrayD::operator[](Int_t i) |
| Double_t | TArrayD::operator[](Int_t i) const |
| virtual void | TH1::Paint(Option_t* option = "") |
| virtual Double_t | PoissonIter(const Map2D* rho = 0, const Map2D* mask = 0) |
| virtual Int_t | PoissonSolve(const Map2D* rho, const Map2D* mask = 0) |
| virtual void | TObject::Pop() |
| virtual void | TH1::Print(Option_t* option = "") const |
| virtual TH1D& | Profile(const char* name = "prof", const char* title = "", Int_t nbins = 100, Double_t xlow = 999., Double_t xhigh = 999.) |
| TProfile* | TH2::ProfileX(const char* name = "_pfx", Int_t firstybin = 1, Int_t lastybin = -1, Option_t* option = "") constMENU |
| TProfile* | TH2::ProfileY(const char* name = "_pfy", Int_t firstxbin = 1, Int_t lastxbin = -1, Option_t* option = "") constMENU |
| TH1D* | TH2::ProjectionX(const char* name = "_px", Int_t firstybin = 0, Int_t lastybin = -1, Option_t* option = "") constMENU |
| TH1D* | TH2::ProjectionY(const char* name = "_py", Int_t firstxbin = 0, Int_t lastxbin = -1, Option_t* option = "") constMENU |
| virtual void | TH2::PutStats(Double_t* stats) |
| virtual Int_t | TObject::Read(const char* name) |
| static TArray* | TArray::ReadArray(TBuffer& b, const TClass* clReq) |
| virtual TH1* | TH1::Rebin(Int_t ngroup = 2, const char* newname = "", const Double_t* xbins = 0)MENU |
| virtual TH2* | TH2::Rebin2D(Int_t nxgroup = 2, Int_t nygroup = 2, const char* newname = "") |
| virtual void | TH1::RebinAxis(Double_t x, TAxis* axis) |
| virtual TH2* | TH2::RebinX(Int_t ngroup = 2, const char* newname = "") |
| virtual TH2* | TH2::RebinY(Int_t ngroup = 2, const char* newname = "") |
| virtual void | TH1::Rebuild(Option_t* option = "") |
| virtual void | TH1::RecursiveRemove(TObject* obj) |
| virtual Map2D& | Rescale(Double_t sx = 1, Double_t sy = 1, Double_t sz = 1) |
| virtual void | TH2D::Reset(Option_t* option = "") |
| virtual void | TAttFill::ResetAttFill(Option_t* option = "") |
| virtual void | TAttLine::ResetAttLine(Option_t* option = "") |
| virtual void | TAttMarker::ResetAttMarker(Option_t* toption = "") |
| void | TObject::ResetBit(UInt_t f) |
| virtual void | TH1::ResetStats() |
| virtual Map2D& | Resize(Double_t xlow, Double_t ylow, Double_t xhigh, Double_t yhigh, Int_t pixels = 0) const |
| virtual Map2D& | Rotate(Double_t phi = 0, Double_t theta = 0, Double_t psi = 0, Int_t degrees = 0) |
| virtual void | TObject::SaveAs(const char* filename = "", Option_t* option = "") constMENU |
| virtual void | TAttFill::SaveFillAttributes(ostream& out, const char* name, Int_t coldef = 1, Int_t stydef = 1001) |
| virtual void | TAttLine::SaveLineAttributes(ostream& out, const char* name, Int_t coldef = 1, Int_t stydef = 1, Int_t widdef = 1) |
| virtual void | TAttMarker::SaveMarkerAttributes(ostream& out, const char* name, Int_t coldef = 1, Int_t stydef = 1, Int_t sizdef = 1) |
| virtual void | TH1::SavePrimitive(ostream& out, Option_t* option = "") |
| virtual void | TH1::Scale(Double_t c1 = 1, Option_t* option = "") |
| virtual void | TArrayD::Set(Int_t n) |
| void | TArrayD::Set(Int_t n, const Double_t* array) |
| virtual void | TArrayD::SetAt(Double_t v, Int_t i) |
| virtual void | TH1::SetAxisColor(Color_t color = 1, Option_t* axis = "X") |
| virtual void | TH1::SetAxisRange(Double_t xmin, Double_t xmax, Option_t* axis = "X") |
| virtual void | TH1::SetBarOffset(Float_t offset = 0.25) |
| virtual void | TH1::SetBarWidth(Float_t width = 0.5) |
| virtual void | TH2D::SetBinContent(Int_t bin, Double_t content) |
| virtual void | TH2D::SetBinContent(Int_t binx, Int_t biny, Double_t content) |
| virtual void | TH2D::SetBinContent(Int_t binx, Int_t biny, Int_t, Double_t content) |
| virtual void | TH1::SetBinError(Int_t bin, Double_t error) |
| virtual void | TH1::SetBinError(Int_t binx, Int_t biny, Double_t error) |
| virtual void | TH1::SetBinError(Int_t binx, Int_t biny, Int_t binz, Double_t error) |
| virtual void | TH1::SetBinErrorOption(TH1::EBinErrorOpt type) |
| virtual void | TH1::SetBins(Int_t nx, const Double_t* xBins) |
| virtual void | TH1::SetBins(Int_t nx, Double_t xmin, Double_t xmax) |
| virtual void | TH1::SetBins(Int_t nx, const Double_t* xBins, Int_t ny, const Double_t* yBins) |
| virtual void | TH1::SetBins(Int_t nx, Double_t xmin, Double_t xmax, Int_t ny, Double_t ymin, Double_t ymax) |
| virtual void | TH1::SetBins(Int_t nx, const Double_t* xBins, Int_t ny, const Double_t* yBins, Int_t nz, const Double_t* zBins) |
| virtual void | TH1::SetBins(Int_t nx, Double_t xmin, Double_t xmax, Int_t ny, Double_t ymin, Double_t ymax, Int_t nz, Double_t zmin, Double_t zmax) |
| virtual void | TH2D::SetBinsLength(Int_t n = -1) |
| void | TObject::SetBit(UInt_t f) |
| void | TObject::SetBit(UInt_t f, Bool_t set) |
| virtual void | TH1::SetBuffer(Int_t buffersize, Option_t* option = "") |
| virtual void | TH1::SetCellContent(Int_t binx, Int_t biny, Double_t content) |
| virtual void | TH1::SetCellError(Int_t binx, Int_t biny, Double_t content) |
| virtual void | TH1::SetContent(const Double_t* content) |
| virtual void | TH1::SetContour(Int_t nlevels, const Double_t* levels = 0) |
| virtual void | TH1::SetContourLevel(Int_t level, Double_t value) |
| static void | TH1::SetDefaultBufferSize(Int_t buffersize = 1000) |
| static void | TH1::SetDefaultSumw2(Bool_t sumw2 = kTRUE) |
| virtual void | TH1::SetDirectory(TDirectory* dir) |
| virtual void | TObject::SetDrawOption(Option_t* option = "")MENU |
| static void | TObject::SetDtorOnly(void* obj) |
| virtual void | TH1::SetEntries(Double_t n) |
| virtual void | TH1::SetError(const Double_t* error) |
| virtual void | TAttFill::SetFillAttributes()MENU |
| virtual void | TAttFill::SetFillColor(Color_t fcolor) |
| virtual void | TAttFill::SetFillStyle(Style_t fstyle) |
| virtual void | TH1::SetLabelColor(Color_t color = 1, Option_t* axis = "X") |
| virtual void | TH1::SetLabelFont(Style_t font = 62, Option_t* axis = "X") |
| virtual void | TH1::SetLabelOffset(Float_t offset = 0.005, Option_t* axis = "X") |
| virtual void | TH1::SetLabelSize(Float_t size = 0.02, Option_t* axis = "X") |
| virtual void | TAttLine::SetLineAttributes()MENU |
| virtual void | TAttLine::SetLineColor(Color_t lcolor) |
| virtual void | TAttLine::SetLineStyle(Style_t lstyle) |
| virtual void | TAttLine::SetLineWidth(Width_t lwidth) |
| virtual void | TAttMarker::SetMarkerAttributes()MENU |
| virtual void | TAttMarker::SetMarkerColor(Color_t tcolor = 1) |
| virtual void | TAttMarker::SetMarkerSize(Size_t msize = 1) |
| virtual void | TAttMarker::SetMarkerStyle(Style_t mstyle = 1) |
| virtual void | TH1::SetMaximum(Double_t maximum = -1111)MENU |
| virtual void | TH1::SetMinimum(Double_t minimum = -1111)MENU |
| virtual void | TH1::SetName(const char* name)MENU |
| virtual void | TH1::SetNameTitle(const char* name, const char* title) |
| virtual void | TH1::SetNdivisions(Int_t n = 510, Option_t* axis = "X") |
| virtual void | TH1::SetNormFactor(Double_t factor = 1) |
| static void | TObject::SetObjectStat(Bool_t stat) |
| virtual void | TH1::SetOption(Option_t* option = " ") |
| virtual void | TH2::SetShowProjectionX(Int_t nbins = 1)MENU |
| virtual void | TH2::SetShowProjectionY(Int_t nbins = 1)MENU |
| virtual void | TH1::SetStats(Bool_t stats = kTRUE)MENU |
| virtual void | TH1::SetTickLength(Float_t length = 0.02, Option_t* axis = "X") |
| virtual void | TH1::SetTitle(const char* title)MENU |
| virtual void | TH1::SetTitleFont(Style_t font = 62, Option_t* axis = "X") |
| virtual void | TH1::SetTitleOffset(Float_t offset = 1, Option_t* axis = "X") |
| virtual void | TH1::SetTitleSize(Float_t size = 0.02, Option_t* axis = "X") |
| virtual void | TObject::SetUniqueID(UInt_t uid) |
| virtual void | TH1::SetXTitle(const char* title) |
| virtual void | TH1::SetYTitle(const char* title) |
| virtual void | TH1::SetZTitle(const char* title) |
| virtual Map2D& | Shift(Double_t dx = 0, Double_t dy = 0, Double_t dz = 0) |
| virtual TH1* | TH2::ShowBackground(Int_t niter = 20, Option_t* option = "same") |
| virtual void | ShowMembers(TMemberInspector&) |
| virtual Int_t | TH2::ShowPeaks(Double_t sigma = 2, Option_t* option = "", Double_t threshold = 0.05)MENU |
| virtual Int_t | TNamed::Sizeof() const |
| virtual void | TH2::Smooth(Int_t ntimes = 1, Option_t* option = "")MENU |
| static void | TH1::SmoothArray(Int_t NN, Double_t* XX, Int_t ntimes = 1) |
| static void | TH1::StatOverflows(Bool_t flag = kTRUE) |
| virtual void | Streamer(TBuffer&) |
| void | StreamerNVirtual(TBuffer& ClassDef_StreamerNVirtual_b) |
| virtual void | TH1::Sumw2() |
| virtual void | TObject::SysError(const char* method, const char* msgfmt) const |
| Bool_t | TObject::TestBit(UInt_t f) const |
| Int_t | TObject::TestBits(UInt_t f) const |
| virtual Double_t | TotalCurl(const Map2D* Vx, const Map2D* Vy, Map2D** silhouette = 0) |
| static TH1* | TH1::TransformHisto(TVirtualFFT* fft, TH1* h_output, Option_t* option) |
| virtual Map2D& | Uncurl(const Map2D* Vx, const Map2D* Vy, Int_t comp) |
| virtual void | TH1::UseCurrentStyle() |
| virtual void | TObject::Warning(const char* method, const char* msgfmt) const |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) |
| virtual Int_t | TObject::Write(const char* name = 0, Int_t option = 0, Int_t bufsize = 0) const |
| static void | TArray::WriteArray(TBuffer& b, const TArray* a) |
| virtual Int_t | ZeroSuppress(Double_t threshold, Double_t zero = 0) |
protected:
| Bool_t | TArray::BoundsOk(const char* where, Int_t at) const |
| virtual Int_t | TH2::BufferFill(Double_t, Double_t) |
| virtual Int_t | TH2::BufferFill(Double_t x, Double_t y, Double_t w) |
| static bool | TH1::CheckAxisLimits(const TAxis* a1, const TAxis* a2) |
| static bool | TH1::CheckBinLabels(const TAxis* a1, const TAxis* a2) |
| static bool | TH1::CheckBinLimits(const TAxis* a1, const TAxis* a2) |
| static bool | TH1::CheckConsistency(const TH1* h1, const TH1* h2) |
| static bool | TH1::CheckConsistentSubAxes(const TAxis* a1, Int_t firstBin1, Int_t lastBin1, const TAxis* a2, Int_t firstBin2 = 0, Int_t lastBin2 = 0) |
| static bool | TH1::CheckEqualAxes(const TAxis* a1, const TAxis* a2) |
| virtual void | TObject::DoError(int level, const char* location, const char* fmt, va_list va) const |
| virtual void | TH2::DoFitSlices(bool onX, TF1* f1, Int_t firstbin, Int_t lastbin, Int_t cut, Option_t* option, TObjArray* arr) |
| virtual Double_t | TH1::DoIntegral(Int_t ix1, Int_t ix2, Int_t iy1, Int_t iy2, Int_t iz1, Int_t iz2, Double_t& err, Option_t* opt, Bool_t doerr = kFALSE) const |
| virtual TProfile* | TH2::DoProfile(bool onX, const char* name, Int_t firstbin, Int_t lastbin, Option_t* option) const |
| virtual TH1D* | TH2::DoProjection(bool onX, const char* name, Int_t firstbin, Int_t lastbin, Option_t* option) const |
| virtual Bool_t | TH1::FindNewAxisLimits(const TAxis* axis, const Double_t point, Double_t& newMin, Double_t& newMax) |
| void | TObject::MakeZombie() |
| Bool_t | TArray::OutOfBoundsError(const char* where, Int_t i) const |
| static Bool_t | TH1::RecomputeAxisLimits(TAxis& destAxis, const TAxis& anAxis) |
| Map2D* | rescale(Double_t sx, Double_t sy, Double_t sz, Double_t x0, Double_t y0, Double_t z0) const |
| Map2D* | rotateX(Double_t thetarad, Double_t y0, Double_t z0) const |
| Map2D* | rotateY(Double_t thetarad, Double_t x0, Double_t z0) const |
| Map2D* | rotateZ(Double_t phirad, Double_t x0, Double_t y0) const |
| static Bool_t | TH1::SameLimitsAndNBins(const TAxis& axis1, const TAxis& axis2) |
| virtual void | TH1::SavePrimitiveHelp(ostream& out, const char* hname, Option_t* option = "") |
| Map2D* | shift(Double_t dx, Double_t dy, Double_t dz) const |
Data Members
public:
| enum TH1::EBinErrorOpt { | kNormal | |
| kPoisson | ||
| kPoisson2 | ||
| }; | ||
| enum TH1::[unnamed] { | kNoStats | |
| kUserContour | ||
| kCanRebin | ||
| kLogX | ||
| kIsZoomed | ||
| kNoTitle | ||
| kIsAverage | ||
| kNstat | ||
| }; | ||
| enum TObject::EStatusBits { | kCanDelete | |
| kMustCleanup | ||
| kObjInCanvas | ||
| kIsReferenced | ||
| kHasUUID | ||
| kCannotPick | ||
| kNoContextMenu | ||
| kInvalidObject | ||
| }; | ||
| enum TObject::[unnamed] { | kIsOnHeap | |
| kNotDeleted | ||
| kZombie | ||
| kBitMask | ||
| kSingleKey | ||
| kOverwrite | ||
| kWriteDelete | ||
| }; |
public:
| Double_t* | TArrayD::fArray | [fN] Array of fN doubles |
| Int_t | TArray::fN | Number of array elements |
| static const Double_t | zunit2xy |
protected:
| Short_t | TH1::fBarOffset | (1000*offset) for bar charts or legos |
| Short_t | TH1::fBarWidth | (1000*width) for bar charts or legos |
| TH1::EBinErrorOpt | TH1::fBinStatErrOpt | option for bin statistical errors |
| Double_t* | TH1::fBuffer | [fBufferSize] entry buffer |
| Int_t | TH1::fBufferSize | fBuffer size |
| TArrayD | TH1::fContour | Array to display contour levels |
| Int_t | TH1::fDimension | !Histogram dimension (1, 2 or 3 dim) |
| TDirectory* | TH1::fDirectory | !Pointer to directory holding this histogram |
| Double_t | TH1::fEntries | Number of entries |
| Color_t | TAttFill::fFillColor | fill area color |
| Style_t | TAttFill::fFillStyle | fill area style |
| TList* | TH1::fFunctions | ->Pointer to list of functions (fits and user) |
| Double_t* | TH1::fIntegral | !Integral of bins used by GetRandom |
| Color_t | TAttLine::fLineColor | line color |
| Style_t | TAttLine::fLineStyle | line style |
| Width_t | TAttLine::fLineWidth | line width |
| Color_t | TAttMarker::fMarkerColor | Marker color index |
| Size_t | TAttMarker::fMarkerSize | Marker size |
| Style_t | TAttMarker::fMarkerStyle | Marker style |
| Double_t | TH1::fMaximum | Maximum value for plotting |
| Double_t | TH1::fMinimum | Minimum value for plotting |
| TString | TNamed::fName | object identifier |
| Int_t | TH1::fNcells | number of bins(1D), cells (2D) +U/Overflows |
| Double_t | TH1::fNormFactor | Normalization factor |
| TString | TH1::fOption | histogram options |
| TVirtualHistPainter* | TH1::fPainter | !pointer to histogram painter |
| Double_t | TH2::fScalefactor | Scale factor |
| TArrayD | TH1::fSumw2 | Array of sum of squares of weights |
| TString | TNamed::fTitle | object title |
| Double_t | TH1::fTsumw | Total Sum of weights |
| Double_t | TH1::fTsumw2 | Total Sum of squares of weights |
| Double_t | TH1::fTsumwx | Total Sum of weight*X |
| Double_t | TH1::fTsumwx2 | Total Sum of weight*X*X |
| Double_t | TH2::fTsumwxy | Total Sum of weight*X*Y |
| Double_t | TH2::fTsumwy | Total Sum of weight*Y |
| Double_t | TH2::fTsumwy2 | Total Sum of weight*Y*Y |
| TAxis | TH1::fXaxis | X axis descriptor |
| TAxis | TH1::fYaxis | Y axis descriptor |
| TAxis | TH1::fZaxis | Z axis descriptor |
| static Bool_t | TH1::fgAddDirectory | !flag to add histograms to the directory |
| static Int_t | TH1::fgBufferSize | !default buffer size for automatic histograms |
| static Bool_t | TH1::fgDefaultSumw2 | !flag to call TH1::Sumw2 automatically at histogram creation time |
| static Bool_t | TH1::fgStatOverflows | !flag to use under/overflows in statistics |
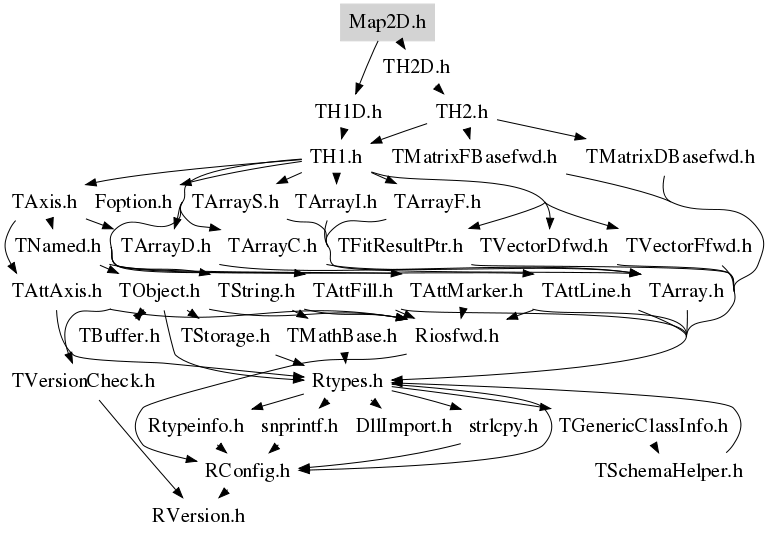
Class Charts
{kind=link}
{kind=link}
{kind=link}

Function documentation
Map2D()
Map2D & Shift(Double_t dx = 0, Double_t dy = 0, Double_t dz = 0)
Translates the map image by a distance (dx,dy) in map coordinates, and shifts all pixels up or down by vertical distance dz in height units. Image regions shifted outside the range of the map are lost. Image regions shift into the range of the map from outside are zero. Original contents are overwritten.
Map2D * shift(Double_t dx, Double_t dy, Double_t dz) const
Same as Shift(), except a new object is created to hold the results and returned, and the original object is not touched. The caller must delete the returned object.
Map2D & Rotate(Double_t phi = 0, Double_t theta = 0, Double_t psi = 0, Int_t degrees = 0)
Rotates the map image by Euler angles phi,theta,psi about the center of the map surface. Angles may be in degrees (degrees=1) or radians (degrees=0). The angle phi determines the direction of the theta rotation axis in the xy plane, and does not generate an independent rotation. Map rotations only make sense for small theta. The theta rotation is implemented as a rotation about the x axis by angle theta*cos(phi) followed by a rotation about the y axis by angle theta*sin(phi), with errors entering at the level of theta^3. Rotations in the xy plane (angle psi) may be of any size, and may result in clipping of the image. Regions of the map that are rotated outside the map range are lost. Original contents of the map are overwritten.
Map2D * rotateX(Double_t thetarad, Double_t y0, Double_t z0) const
Rotates the map image about the x axis by angle thetarad in radians. The rotation axis is located at coordinate y0 and height z0. The map must remain single-valued after the rotation, which places an upper limit on the magnitude of theta that depends on the height profile of the map relative to z0. An error message is printed if this constraint is violated. A new Map2D object is created to hold the result, and the original object is untouched. The caller must delete the returned object.
Map2D * rotateY(Double_t thetarad, Double_t x0, Double_t z0) const
Rotates the map image about the y axis by angle thetarad in radians. The rotation axis is located at coordinate x0 and height z0. The map must remain single-valued after the rotation, which places an upper limit on the magnitude of theta that depends on the height profile of the map relative to z0. An error message is printed if this constraint is violated. A new Map2D object is created to hold the result, and the original object is untouched. The caller must delete the returned object.
Map2D * rotateZ(Double_t phirad, Double_t x0, Double_t y0) const
Rotates the map image about the z axis by angle thetarad in radians. The rotation axis is located at (x0,y0) in map coordinates. There are no assumed bounds on phirad. Regions of the image that move outside the map range are clipped and lost. Regions of the image that move into the range from outside are zero. A new Map2D object is created to hold the result, and the original object is untouched. The caller must delete the returned object.
Map2D & Rescale(Double_t sx = 1, Double_t sy = 1, Double_t sz = 1)
Rescales the map image along all three axes by independent scale factors. The origin of the rescaling is taken to be the center of the map in x and y, and z=0. The original map is overwritten. Note: the special case of sx=-1,sy=1,sz=-1 or sx=1,sy=-1,sz=-1 can be used to invert the surface, effectively flipping it over.
Map2D & Resize(Double_t xlow, Double_t ylow, Double_t xhigh, Double_t yhigh, Int_t pixels = 0) const
Creates a new map with bounds set by corner coordinates (xlow,ylow)
and (xhigh,yhigh), then copies this map into the new one. The
original map (*this) is not modified. The name of the new map is
the name of this map with the suffix "_rN", where N is an integer
starting with 1 and counting forward.
Map2D * rescale(Double_t sx, Double_t sy, Double_t sz, Double_t x0, Double_t y0, Double_t z0) const
Rescales the map image along all three axes by independent scale factors. The origin of the rescaling is (x0,y0) in map coordinates, and z0 in height units. A new object is created to hold the result and the original object is untouched. The caller must delete the returned object.
Double_t Correlation(const Map2D* map, Double_t contrast = 1) const
Computes the height correlation with another map, useful for aligning two images of the same terrain. The contrast argument serves as a weight factor on terms in the sum where one or the other of the two maps is zero. This allows control over how zero regions are treated, such that contrast=0 : ignore zero regions contrast=1 : treat them like plateaus with z=0 contrast=BIG : boundaries dominate, maps are B/W Agreement between their coordinate ranges is not required, but the two maps must have the same dimensions.
Map2D & Fill(const Map2D* map)
Copies the map from the source Map2D object into this object, overwriting this object's data but preserving its dimensions and axis limits. Matte pixels in the source map are ignored, making this method an effective way to overlay two non-overlapping images. No new objects are created.
Map2D & Mask(const Map2D* map, Int_t neg = 0, Double_t value = 0)
Overlays the input map on the output, and masks (overwrites with matte) any cells that are zero in the input map. Cells in the input map that are non-zero are overwritten in *this with the constant "value" unless value=0, in which case those pixels are preserved. If argument "neg" is non-zero, the input map is treated as a negative. Both input and output maps must have the same dimensions. No new objects are created.
Int_t ZeroSuppress(Double_t threshold, Double_t zero = 0)
Scans through the map and finds any pixels less than the supplied threshold value, replacing them with the value zero.
Int_t Despeckle(Int_t maxsize = 0)
Searches the map for regions. Pixels belong to the same region if an unbroken path of contiguous pixels can be found that joins them. Two pixels are contiguous if they share a common edge; touching at the corners does not count. Regions up to maxsize pixels are erased (overwritten with matte) and a count of the remaining islands of greater than maxsize pixels is returned. If called with maxsize=0 then the total number of islands is returned, and the map is not modified.
Int_t Despike(Double_t maxheight, Int_t regionsize = 3)
Searches the map for localized spikes that appear in regions of smoothly varying height, and replaces any spikes that are greater than maxheight above or below the local average surface height with the local neighborhood average. The size of the neighborhood is (2*regionsize+1)x(2*regionsize+1) in pixels. This operation is not reversible.
Map2D & Center()
Finds the center of gravity of the non-zero portion of the map and applies a shift in x,y to locate the center at the midpoint.
Map2D & Level()
Locates the left-most and the right-most pixels in the map with non-zero values and applies an in-plane rotation such that those two pixels are in the same row (y-value) of the map.
Map2D & Normalize()
Finds the maximum and minimum values of the map, excluding cells with zero value, and sets the Max and Min to the corresponding values.
Double_t TotalCurl(const Map2D* Vx, const Map2D* Vy, Map2D** silhouette = 0)
Forms a closed path around the outermost periphery of the map, and computes the total curl of a 2D vector field within that path using Stoke's theorem. The two components of the vector field within the plane of the map are accepted as arguments Vx,Vy. The result is returned in the units of V times coordinate length. The two maps given as arguments must have the same dimensions and bounds in x and y. The object being used to compute the curl is overwritten with a map filled with zeros everywhere except on the contour around which the Stokes integral was performed, with each cell on the contour containing the running integral value up to that point. If optional argument silhouette is provided by the caller, it is overwritten upon return with a pointer to a new Map2D object with the same shape as Vx,Vy whose contents represent an edge-enhanced silhouette of the overlaid input maps, with bin values defined as follows. 0 : the bin is outside the contour, (0,1) : the bin is inside the contour, [1,inf) : the bin is on the contour. It is up to the user to delete the silhouette object when it is no longer needed.
Double_t Curl(const Map2D* Vx, const Map2D* Vy)
Computes the curl of the 2D vector field represented by the components Vx,Vy and stores the result in the *this map. The value stored in each cell of the output map represents the integral of the curl within that cell, so that the sum over all cells in the map should equal the line integral of the field around a closed loop enclosing the non-zero field region, according to Stoke's theorem. The complementary method TotalCurl() is provided to compute the same result using the loop line integral. The return value is the surface integral of the curl.
Map2D & Uncurl(const Map2D* Vx, const Map2D* Vy, Int_t comp)
Computes a correction to a 2D vector field defined on a plane such
that the resulting field has zero curl. This essentially replaces
one of the two degrees of freedom of the field with the constraint.
The argument "comp" tells which of the two components is replaced:
comp = 0: return a replacement for Vx;
comp = 1; return a replacement for Vy.
The read-only map arguments Vx,Vy are not modified.
Algorithm:
There are an infinite number of replacements for Vx,Vy such that
Del x (Vx,Vy) = 0, all of which are related to one another through
gauge transformations. The purpose here is to modify the field in
as minimal a fashion as possible to eliminate the curl. To simplify
the problem, consider only the subset of solutions that leaves Vx [Vy]
unchanged, as selected by the user. This reduces the solution to
finding a set of independent columns [rows] that zeros the curl within
that column [row] subject to some criterion for minimal modification.
In 1D the zero-curl constrain reduces to a first-order differences
equation (first-order inhomogenous differential equation in 1D written
in finite-element form) which has just one overall undetermined offset.
I chose the offset to minimize the sum of the squared differences
from the corresponding input map. This uniquely determines the result.
Double_t Divergence(const Map2D* Vx, const Map2D* Vy)
Computes the divergence of the vector field V whose x,y components are passed in as the maps Vx,Vy. The contents of map *this are overwritten with the result. The return value is the total divergence integrated over the output map, in units of V times coordinate length. The two maps given as arguments must have the same dimensions and bounds in x and y.
Int_t Gradient(Map2D* Vx, Map2D* Vy) const
Computes the gradient of the scalar field V in map *this and stores the x,y components of the gradient in output maps Vx,Vy. Arguments Vx,Vy must point to maps which have been created by the user at input, otherwise the corresponding gradient component is not computed. At output these maps are overwritten by the computed gradient components. If both pointer arguments are zero at input the routine does nothing and returns 0, otherwise it returns the total number of pixels in the map *this for which the gradient vector has been computed.
Int_t PoissonSolve(const Map2D* rho, const Map2D* mask = 0)
Solves the Poisson equation in two dimensions with a source given by input map rho, subject to the boundary conditions contained in this object at entry. If input argument "mask" points to an existing object, that object is interpreted as a mask for the pixels in map *this that contain boundary values, otherwise all non-zero pixels in map *this at input are considered to specify boundary values. The algorithm will make use of as many (or few) boundary values as the user provides, although the solution may not satisfy all of them exactly if the problem is over-determined, i.e. too many values are provided, or they are clustered in too compact a region of the map. In any case, the solution will attempt to match all of the provided data points as closely as possible, subject to the constraints of Poisson's equation and the resolution of the map. All cells in the map *this are over written with the solution except those specifying boundary conditions. Return value: The return value is the rank of the matrix that expresses LaPlace's equation for the given boundary conditions. The rank expresses the effective number of independent boundary values that were used in attempting the satisfy the stated boundary conditions. Algorithm: First the Green's function for the 2D Poisson equation with a point (single pixel) source is evaluated for each non-zero pixel in rho, and the results are superimposed. At this point, the solution obeys Poisson's equation but with arbitrary boundary conditions. The map is now subtracted from map *this that specify the boundary values for the problem, and the resulting map is handed to LaplaceSolve() to find the homogeneous part of the solution. Adding the homogenous and inhomogenous parts yields the full solution, which is returned in this object. Timing: The time required to complete this function increases quickly with the dimensions of the map. The following figures are for a single Intel Core2 quad-core processor at 3.4GHz running a single thread. t = (56 + 5.3e-8 Ndim^4.2 + 4.9e-9 Ndim^4.2) seconds ^ ^ ^ | | | | | \. | | \--- compute the homogeneous part | | | \--- compute the Greens function integral | \--- compute the Greens function (35x35 discrete kernel) Example: for a 1000 x 1000 pixel map, t = 229,000 seconds (64 hr)
Double_t PoissonIter(const Map2D* rho = 0, const Map2D* mask = 0)
Iterates the Poisson equation in two dimensions with a source given by
input map rho, subject to the boundary conditions contained in this
object at entry. If input argument "mask" points to an existing object,
that object is interpreted as a mask for the pixels in map *this that
contain boundary values, otherwise all non-zero pixels in map *this
at input are considered to specify boundary values. The algorithm
will make use of as many (or few) boundary values as the user provides,
although the solution may not satisfy all of them exactly if the
problem is over-determined, i.e. too many values are provided, or they
are clustered in too compact a region of the map. In any case, the
solution will attempt to match all of the provided data points as
closely as possible, subject to the constraints of Poisson's equation
and the resolution of the map. All cells in the map *this are over
written with the solution except those specifying boundary conditions.
Return value:
The largest correction that was applied to any cell in the map in the
present iteration, or zero if no changes were made.
Algorithm:
The following formula is applied to all cells except those with rho=0
and the ones that specify boundary conditions. Boundary condition
cells are identified by having a non-zero value in the corresponding
cell of the mask map, or if mask=0, by having non-zero values in the
*this map at entry.
/ (n) (n) \ 2 / (n) (n) \ 2 2 2
| u + u | dy + | u + u | dx - rho dx dy
(n+1) \ i-1,j i+1,j / \ i,j-1 i,j+1 / i,j
u = -------------------------------------------------------------
i,j / 2 2 \ .
2 | dx + dy |
\ / .
Timing:
Bool_t GreensFunction(Double_t x0, Double_t y0)
The Green's function for the 2D Poisson equation can be written most
compactly as follows,
1 | 2 2 |
G(x,y;x ,y ) = ---- log |(x-x ) + (y-y ) |
0 0 4 pi | 0 0 |
where x0,y0 is the location of the source. In two dimensions it is
not possible to set the boundary conditions for G->0 at x0,y0->infinity
so instead one choses that G=0 at some finite radius R. The expression
above has been written with R=1, but adding a constant term can be used
to shift R to an arbitrary radius, except for the singular values 0 and
infinity. The result is loaded into this map, overwriting any contents
that were present at input, but leaving the dimensions and bounds of
the original map unchanged. The point x0,y0 is assumed to lie somewhere
within the bounds of the map.
This is the correct expression for the continuum case, but it diverges
as x,y -> x0,y0, and has large discretization errors for pixels nearby.
For this reason, I take a NxN pixel square region centered around x0,y0
and replace the computed value of G for these pixels with the solution
to the discrete NxN matrix Poisson equation on a square grid, subject
to the boundary condition that the cells around the outer perimeter of
the NxN pixel block match onto the above continuum formula. By chosing
N to be sufficiently large, the residual discretization errors are kept
to a negligible level.
Int_t LaplaceSolve(const Map2D* mask = 0)
Solves the Laplace equation in two dimensions, subject to the boundary
conditions contained in this object at entry. If input argument "mask"
points to an existing object, that object is interpreted as a mask for
the pixels in map *this that contain boundary values, otherwise all
non-zero pixels in map *this at input are considered to specify
boundary values. The algorithm will make use of as many (or few)
boundary values as the user provides, although the solution may not
satisfy all of them exactly if the problem is over-determined, i.e.
too many values are provided, or they are clustered in too compact a
region of the map. In any case, the solution will attempt to match all
of the provided data points as closely as possible, subject to the
constraints of the Laplace equation and the resolution of the map.
All cells in the map *this are over written with the solution.
Algorithm:
The problem is solved in the basis of solutions to Laplace's equation
in polar coordinates. Here f_n is a stackable column vector of two
basis functions
/ .
m | cos(m phi)
f (x,y) = r <
m | sin(m phi)
\ .
There is a second set of solutions that are singular at the origin,
but these are excluded because the interior region of the map is
assumed to include the origin, taken to lie at the geometric center
of the map. Note that for n=0 the second element of f_n is identically
zero. To form a column vector of basis functions F_i, imagine a stack
of f_m column vectors starting with m=0 at the top, and increasing
downward until the number N of elements in F equals at least M, the
number the pixels (x_j,y_j), j=0..M that are provided as boundary
values in the input map. This results in a large MxN matrix A_ji
such that
A = F ( x , y )
j,i i j j
Solving Laplace's equation now amounts to solving the linear equation
A C = z
j,i i j
for unknown coefficients C_i in terms of initial values z_j for pixel j.
In general A is not a square matrix, and has many singular values. I
solve this equation using singular value decomposition, and identify
the rank of the matrix A, which is passed as the return value from this
method. The results of the singular value decomposition are used to
filter the given values z_j into the unknown coefficients C_i, which
are then used to fill the map with the optimal solution to the boundary
value problem.
The user should pay careful attention to this value, as it may
indicate that the problem is ill-posed. In general, one expects that
the rank will be close to the number of boundary values provided. It
will never be greater. If the rank is significantly less than the
number of boundary values provided, it may indicate that the boundary
values over-determine the solution, or it may simply mean that fewer
basis functions are needed to describe the solution than the number
of boundary values would naively suggest.
TH1D & Profile(const char* name = "prof", const char* title = "", Int_t nbins = 100, Double_t xlow = 999., Double_t xhigh = 999.)
Scans over the map and forms a histogram of the cell heights, omitting the cells that contain zero.